Componentes
| Qtd | Descrição |
|---|---|
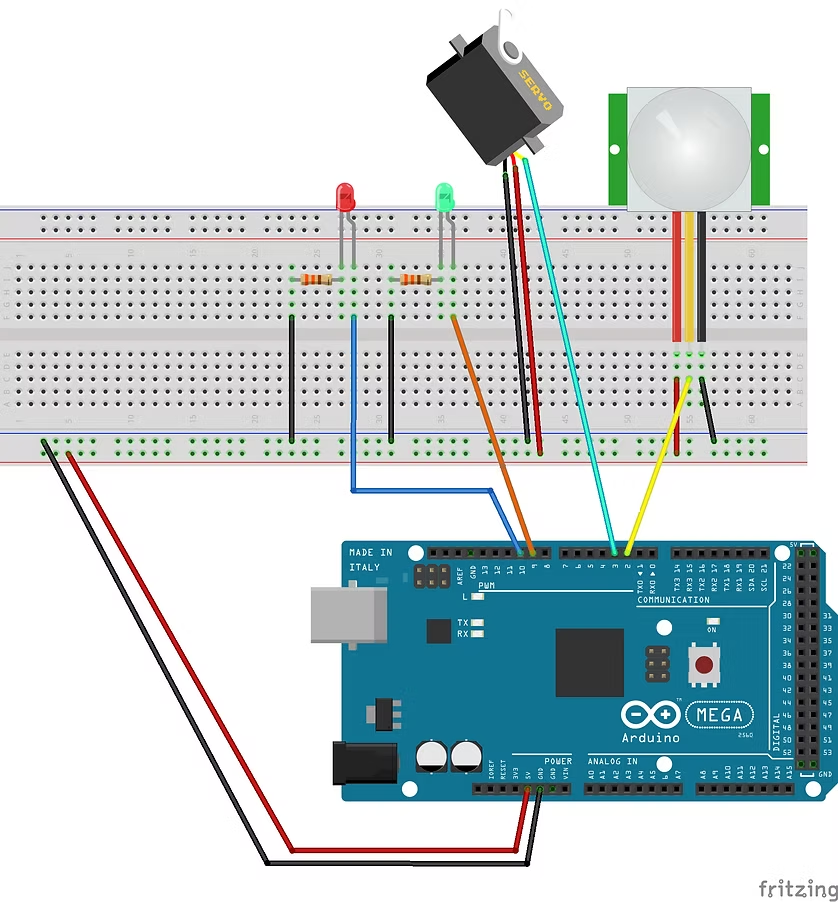
| 01 | Arduino Mega 2560 → |
| 01 | Protoboard→ |
| 02 | LEDs (01 Vermelho - 01 Verde)→ |
| 02 | Resistores 220Ω para os Leds→ |
| 01 | Sensor de Movimento (PIR)→ |
| 01 | Micro Servo Motor 9g (SG90)→ |
| - | Jumpers→ |
Instruções
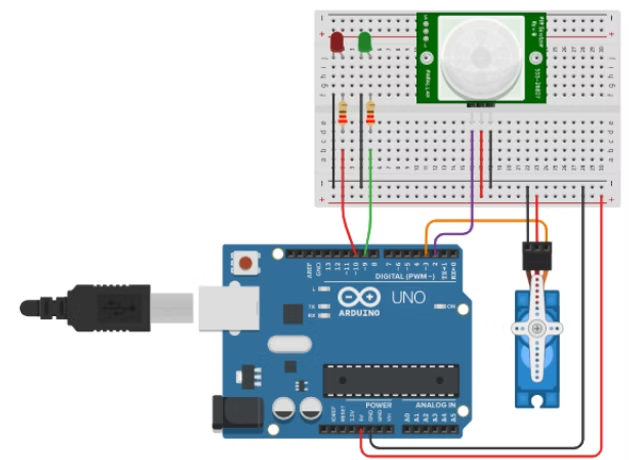
- Sensor de Movimento na porta digital (2)
- Micro servo na porta digital (3)
- É necessário instalar a biblioteca: #include <Servo.h> para utilizar o Micro Servo.
Conhecimentos Requeridos
Observações Técnicas
-
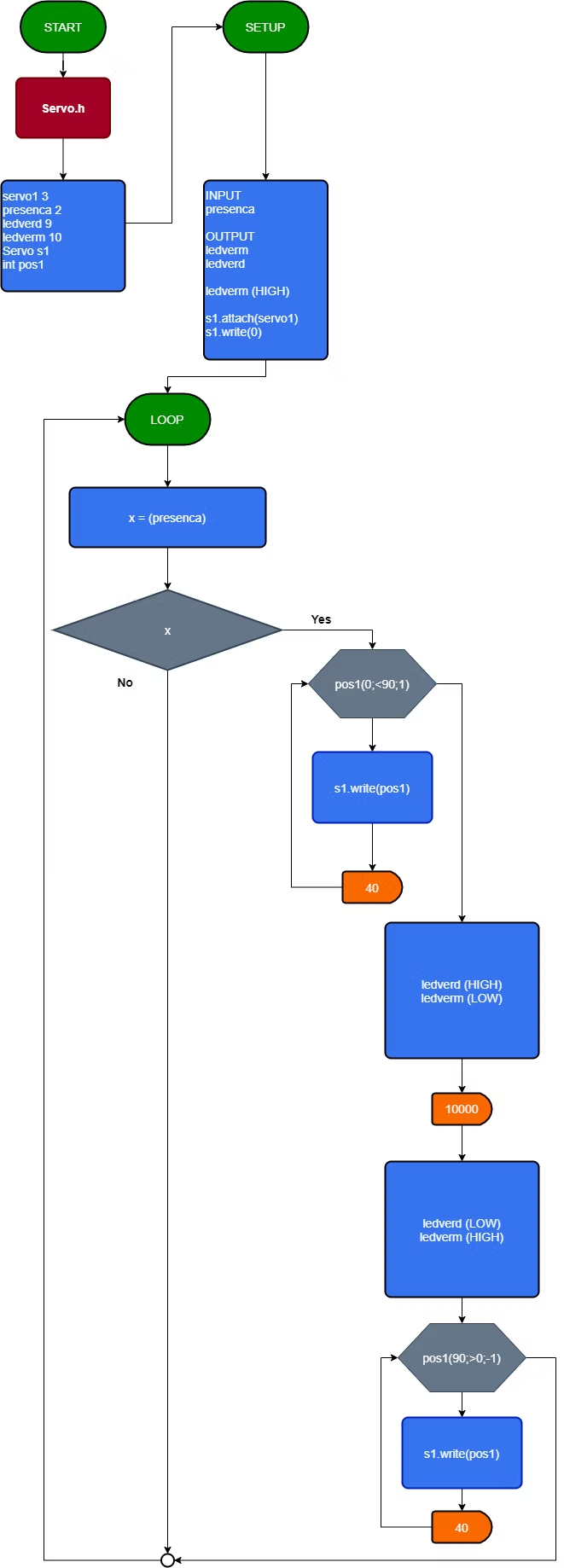
Diagrama de Blocos
Protótipo do Circuito
Código do Projeto
Baixar .INO
#include <Servo.h>
#define servo1 3
#define presenca 2
#define ledverm 10
#define ledverd 9
Servo s1;
int pos1; // posição do servo 1
void setup() {
// put your setup code here, to run once:
Serial.flush();
pinMode(presenca,INPUT);
pinMode(ledverm, OUTPUT);
pinMode(ledverd, OUTPUT);
digitalWrite(ledverm, HIGH);
s1.attach(servo1);
Serial.begin(9600);
s1.write(0); // Iniciar servo 1 na posição zero
}
void loop() {
// put your main code here, to run repeatedly:
int x = digitalRead(presenca);
if (x == HIGH) {
for (pos1 = 0; pos1 < 90; pos1++) {
s1.write(pos1);
delay(40);
}
digitalWrite(ledverd, HIGH);
digitalWrite(ledverm, LOW);
delay(10000);
digitalWrite(ledverd, LOW);
digitalWrite(ledverm, HIGH);
for(pos1 = 90; pos1 > 0; pos1--)
{
s1.write(pos1);
delay(40);
}
}
}
Ambiente de Simulação