Protoboard (Matriz de Contato)
A Protoboard é uma placa de ensaio usada para montar circuitos elétricos experimentais de forma rápida e eficiente. Ela elimina a necessidade de soldagem, permitindo que a corrente percorra conexões condutoras internas que interligam os componentes.
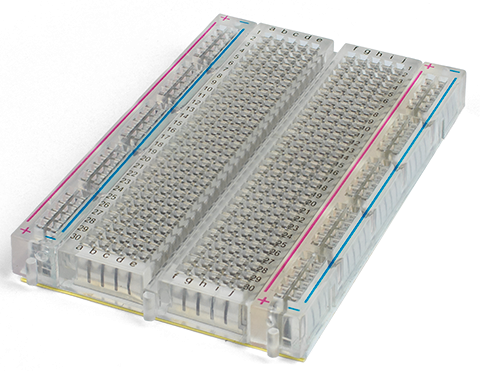
Linhas de Alimentação
Localizadas nas bordas, possuem conexão horizontal. São usadas para fornecer energia (+ e -) a todo o projeto.
Linhas de Conexão
Localizadas no centro, possuem conexão vertical em grupos de 5 furos. São onde os componentes são interligados.
Especificações
Material:Plástico ABS e Bronze FosforosoFuros:400 ou 830 pontosSulco Central:Isolamento para CIs
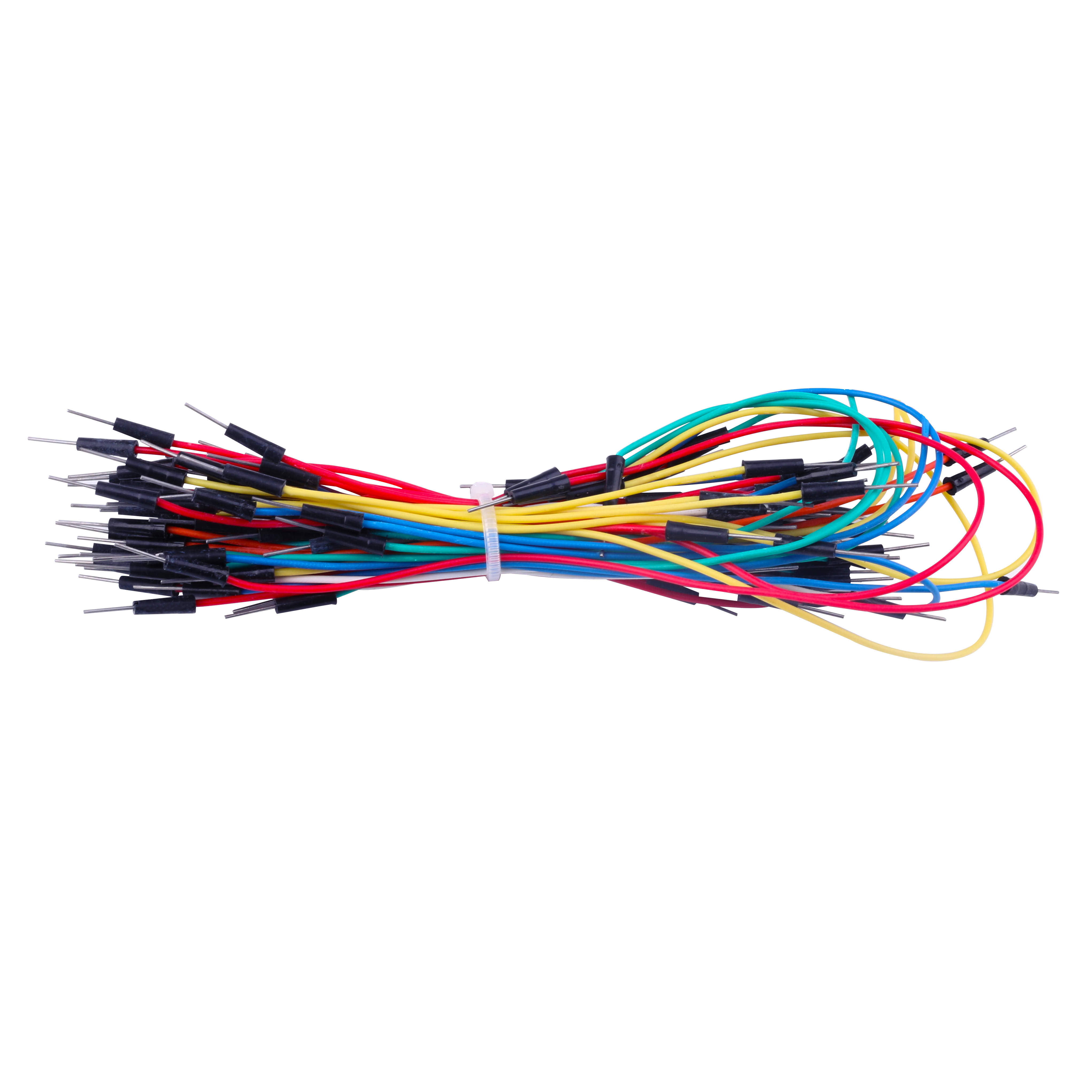
Jumpers (Fios de Conexão)
Os Jumpers ou fios de conexão são condutores elétricos utilizados para estabelecer interligações entre sensores, módulos e a placa Arduino. Eles são fundamentais para organizar o cabeamento de um protótipo, facilitando a montagem e os testes em protoboards.
Organização e Praticidade
Esses cabos permitem economizar espaço e simplificar o roteamento de sinais em um projeto. Por serem flexíveis e possuírem conectores pré-moldados, evitam o mau contato e a confusão visual em circuitos complexos.
Essencial para Prototipagem
São amplamente utilizados para conectar componentes que possuem pinagem macho a placas com pinagem fêmea (como o Arduino) ou vice-versa, sem a necessidade de soldagem permanente.
Tipos Disponíveis
Macho-Macho:Possui pinos em ambas as extremidades. Ideal para conectar dois pontos em uma protoboard.Macho-Fêmea:Possui um pino em um lado e um receptáculo no outro. Comum para ligar sensores externos ao Arduino.Fêmea-Fêmea:Possui receptáculos em ambos os lados. Utilizado para conectar componentes que já possuem pinos expostos.
Resistores
Os Resistores são componentes eletrônicos passivos projetados para oferecer oposição à passagem da corrente elétrica. Eles são fundamentais para controlar a voltagem e a corrente em diferentes partes de um circuito, garantindo que componentes sensíveis operem com segurança.

Características e Funcionamento
- Unidade de Medida: Medida em Ohms (Ω), com múltiplos como kΩ (mil) e MΩ (milhão).
- Queda de Tensão: Causam uma queda de tensão proporcional à corrente, conforme a Lei de Ohm (V = I * R).
- Conservação: Limitam a corrente, mas a quantidade que entra em um terminal é exatamente igual à que sai pelo outro.
Observações:
Divisor de Tensão:Cria tensões proporcionais em partes do circuito.Proteção:Limita a corrente para evitar a queima de LEDs e sensores.Filtros:Em conjunto com capacitores, selecionam frequências de sinal.
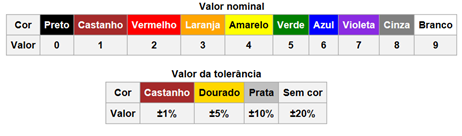
Código de Cores
Como os resistores são componentes pequenos, seus valores são identificados por faixas coloridas. A leitura correta dessas faixas permite determinar a resistência nominal e a margem de erro (tolerância).
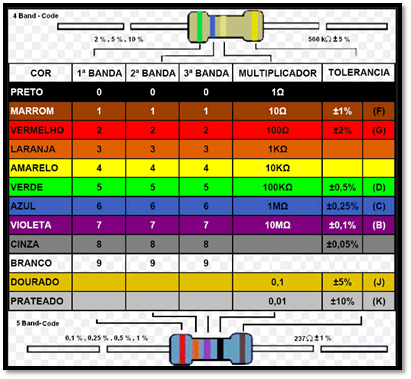
Exemplo de Leitura (4 Faixas)
- Faixa A (1º dígito): Vermelho (2)
- Faixa B (2º dígito): Verde (5)
- Faixa C (Multiplicador): Laranja (1000)
- Faixa D (Tolerância): Dourado (± 5%)
Valor: 25 x 1000 Ω
Resultado: 25K.000 Ω ou 25 kΩ
Tolerância: ± 5%Resistor de Pull-up / Pull-down
Essas configurações são essenciais para evitar o estado de "flutuação" em pinos de entrada digital. Elas garantem que o Arduino leia um nível lógico estável (HIGH ou LOW) quando nenhum botão estiver pressionado.
Pull-up Interno
O Arduino possui resistores de pull-up internos em quase todos os pinos, que podem ser ativados via código com pinMode(pino, INPUT_PULLUP).
Cálculo do Pull-up Externo
Supondo uma limitação de corrente de 1mA (0.001A) para garantir estabilidade no pino de entrada:
5 = R x 0.001
R = 5000 Ω (ou 5 kΩ)Um valor comum utilizado na prática para pull-up é o resistor de 10 kΩ.
LED Difuso (Diodo Emissor de Luz)
O LED é um componente semicondutor que converte energia elétrica em luz. Ele possui polaridade, o que significa que a corrente elétrica flui em apenas um sentido. A versão "difusa" possui um encapsulamento fosco que espalha a luz de forma uniforme, sendo ideal para sinalização.
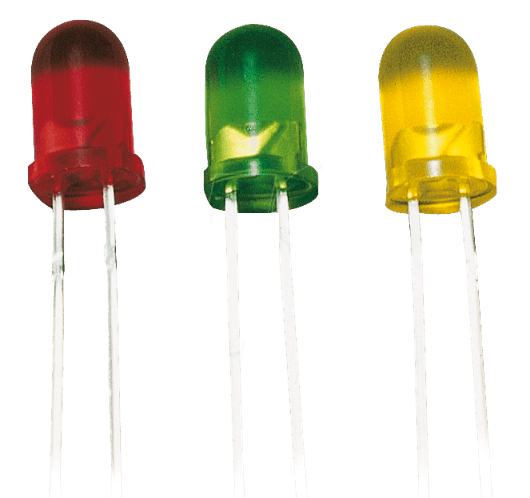
Identificação de Terminais
- Ânodo (+): Terminal maior, deve ser ligado ao positivo.
- Cátodo (-): Terminal menor e lado chanfrado no corpo do LED, deve ser ligado ao negativo (GND).
Eficiência e Proteção
LEDs são extremamente duráveis, mas sensíveis. Como o Arduino opera em 5V e a maioria dos LEDs trabalha com tensões menores, o uso de um resistor é obrigatório para limitar a corrente e evitar a queima imediata.
Especificações Técnicas
Corrente de Operação:Tipicamente 20mA a 30mA.Tensão (Vermelho):1.9V a 2.2VTensão (Verde):2.0V a 3.2VTensão (Azul/Branco):3.0V a 3.4V
Dimensionamento do Resistor
Para calcular o resistor ideal, utilizamos a Lei de Ohm adaptada:
VF é a voltagem fornecida, VL é a voltagem do LED e I é a corrente do LED.
Exemplo Prático: Para um LED de 2V com corrente de 35mA conectado a uma fonte de 5V (Arduino):
R = (5V - 2V) / 0.035A
R = 3 / 0.035
R = 85.71 ΩComo os resistores possuem valores comerciais padronizados, o valor mais próximo e seguro para este caso é o de 100 Ω.
LED RGB Difuso
O LED RGB (Red, Green, Blue) integra três diodos em um único encapsulamento. Através da técnica de PWM, é possível controlar a intensidade de cada cor individualmente, permitindo a composição de milhares de cores diferentes, funcionando de forma semelhante aos pixels de uma tela de TV.
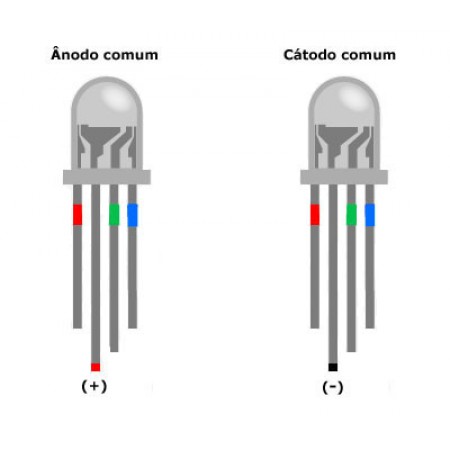
Ânodo vs Cátodo Comum
Existem dois tipos principais de LED RGB, definidos pelo seu terminal mais longo:
- Cátodo Comum (-): O pino longo é conectado ao GND. As cores ligam quando recebem sinal HIGH.
- Ânodo Comum (+): O pino longo é conectado ao 5V. As cores ligam quando recebem sinal LOW.
Uso de Resistores
Cada terminal de cor possui uma queda de tensão diferente. Por isso, é obrigatório o uso de um resistor adequado para cada um dos três pinos de cor, evitando sobrecarga e garantindo o equilíbrio das cores.
Especificações Técnicas (Tensões Médias)
Vermelho (Red):1.8V a 2.0VVerde (Green):3.2V a 3.4VAzul (Blue):3.2V a 3.4VCorrente Máxima:20mA por cor
Identificação da Pinagem
Olhando para o LED com os pinos voltados para baixo e o terminal mais longo sendo o segundo da esquerda para a direita:
| Pino | Função |
|---|---|
| Pino 1 | ● Vermelho (Red) |
| Pino 2 (Longo) | Comum (VCC ou GND) |
| Pino 3 | ● Verde (Green) |
| Pino 4 | ● Azul (Blue) |
Buzzer Ativo
O Buzzer Ativo é um dispositivo de áudio compacto, projetado para emitir sinais sonoros de alerta. Por ser um componente "ativo", ele possui um oscilador interno, o que significa que basta aplicar uma tensão contínua para que ele emita som, facilitando sua implementação em projetos de automação.

Aplicações e Eficiência
É amplamente utilizado para criar efeitos sonoros como bipes de confirmação, alarmes de segurança, buzinas em robôs móveis e sinalizações de estados do sistema.
Facilidade de Uso
Sua principal vantagem é a eficiência na produção de som com baixo consumo de energia, sendo acionado diretamente por portas digitais do Arduino (via transistor ou diretamente, dependendo da corrente).
Especificações Técnicas
Tensão de Operação:3V a 12V DCCorrente de Operação:10mA a 30mAFrequência de Saída:2kHz a 4kHz (Sons de alerta)Nível Sonoro:~85dB (a 10cm)
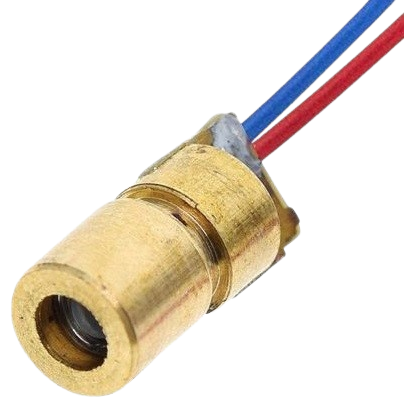
Diodo Laser
O Diodo Laser é um dispositivo semicondutor que emite luz coerente e altamente colimada. Diferente de um LED comum, ele concentra toda a sua potência em um feixe estreito e preciso, permitindo que a luz percorra longas distâncias sem se dispersar significativamente.
Precisão e Alcance
Devido ao seu formato de feixe em ponto, é o componente ideal para sistemas de alarmes (barreiras ópticas), contadores de objetos em esteiras e até sistemas de comunicação óptica simples.
Compatibilidade
Projetado para ser alimentado diretamente por fontes comuns de 5V, ele se integra perfeitamente ao ecossistema Arduino sem a necessidade de drivers complexos para aplicações básicas.
Especificações Técnicas
Tensão de Operação:5V DCFormato do Feixe:Ponto (Concentrado)Comprimento de Onda:Tipicamente 650nm (Vermelho)Potência de Saída:< 5mW (Classe IIIa)Corrente de Operação:< 40mA
Micro Servo Motor 9g (SG90)
O Micro Servo 9g é um atuador eletromecânico que permite o controle preciso da posição angular (geralmente entre 0° e 180°). Ele utiliza um sinal de controle PWM (Pulse Width Modulation) para definir o ângulo do seu eixo, sendo essencial em projetos de braços robóticos, lemes e mecanismos de direção.

Princípio de Controle
Internamente, o servo possui um sensor (potenciômetro) acoplado ao eixo. Um circuito eletrônico compara a posição desejada (enviada via PWM pelo Arduino) com a posição atual, ajustando o motor automaticamente para corrigir qualquer desvio.
Sinal PWM e Posição
O ângulo é determinado pela largura do pulso elétrico enviado. Pulsos curtos (~1ms) levam o motor para 0°, enquanto pulsos longos (~2ms) levam para 180°.
Especificações Técnicas
Tensão de Operação:3,0V a 7,2V (Recomendado: 5V)Ângulo de Rotação:180 grausVelocidade:0,12s / 60° (a 4,8V sem carga)Torque:1.6 kg/cmPeso:9 gramas
Identificação dos Fios (Pinagem)
É fundamental observar as cores dos cabos para evitar a queima do componente:
| Cor do Fio | Função | Conexão Arduino |
|---|---|---|
| ● Vermelho | VCC (Alimentação Positiva) | Pino 5V |
| ● Marrom / Preto | GND (Terra) | Pino GND |
| ● Laranja / Amarelo | Sinal (PWM) | Pino Digital (ex: 9) |
Chave Táctil (Push-Button)
As chaves do tipo Push-Button são utilizadas para abrir ou fechar um circuito de forma manual. Este interruptor permite a condução de corrente apenas enquanto está pressionado, funcionando como um botão eletrônico para controle momentâneo de sinais.

Tipo de Operação
Opera de forma momentânea, o que significa que ele conduz corrente apenas enquanto houver pressão física sobre o botão.
Configuração dos Contatos
Pode ser Normalmente Aberto (NO), onde o circuito fecha ao pressionar, ou Normalmente Fechado (NC), onde o circuito abre ao ser pressionado.
Especificações Técnicas
Operação:MomentâneoContatos:NO (Normalmente Aberto) / NC (Normalmente Fechado)Corrente Máx:50mA a 3A (conforme modelo)Tensão Máx:3V a 250V
Potenciômetro (Resistor Variável)
Os Potenciômetros são resistores ajustáveis que permitem o controle manual da resistência em um circuito. Através de um eixo giratório ou deslizante, é possível variar a intensidade do sinal elétrico, sendo amplamente utilizados para ajustar volumes, brilho de telas e velocidades de motores.
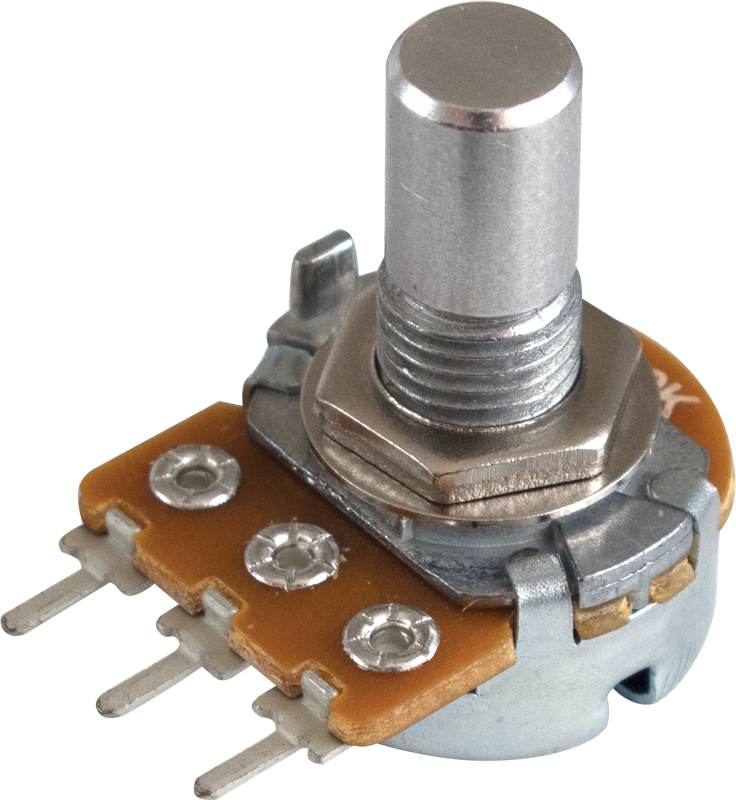
Estrutura e Pinos
Normalmente, possui três conectores:
- Laterais: Onde a energia é aplicada (VCC e GND). A ordem define o sentido do aumento da resistência.
- Central (Wiper): Por onde o sinal ajustado é extraído após passar pela trilha resistiva interna.
Funcionamento Lógico
Ao girar o eixo, o cursor interno se move sobre uma trilha de carbono, alterando a distância que a corrente percorre. No Arduino, ele é lido pelas portas Analógicas (A0 - A5), convertendo o giro em valores de 0 a 1023.
Especificações Técnicas
Resistência Comum:10KΩ (Padrão para projetos Arduino)Tipo:Linear (Variação constante) ou Logarítmico (Comum em Áudio)Ângulo de Rotação:Tipicamente 270° a 300°Potência Máxima:Geralmente 0.1W a 0.5W
Sensor de Luz – LDR
O LDR (Light Dependent Resistor), ou Resistor Dependente de Luz, é um componente cuja resistência elétrica varia de forma inversamente proporcional à intensidade da luz que incide sobre sua superfície de sulfeto de cádmio.
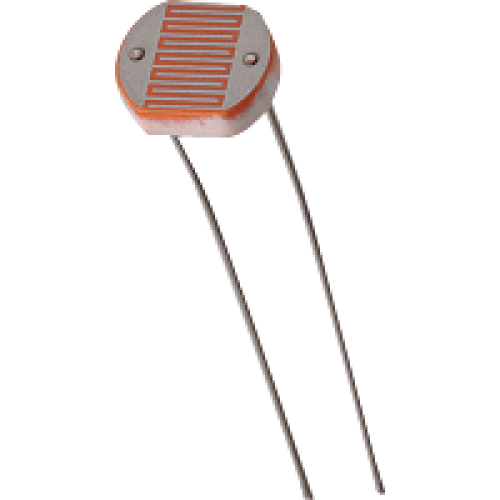
Comportamento Elétrico
Em ambientes escuros, o LDR apresenta uma resistência muito alta (na casa dos MegaOhms). Quando exposto à luz intensa, essa resistência cai drasticamente para valores baixos (centenas de Ohms), permitindo a passagem de mais corrente.
Uso no Arduino
Como o LDR é um componente passivo, ele é geralmente utilizado em um circuito de divisor de tensão com um resistor fixo (comumente de 10kΩ). Isso permite que o Arduino leia a variação de luminosidade como um sinal de tensão através das portas Analógicas.
Especificações Técnicas
Material:Sulfeto de Cádmio (CdS)Resistência no Escuro:Tipicamente > 1 MΩResistência na Luz (10 lux):8 a 20 kΩTensão Máxima:150V DCTempo de Resposta:20ms a 30ms
Sensor de Movimento (PIR)
O sensor PIR (Passive Infrared) é um dispositivo eletrônico que mede a luz infravermelha irradiada pelos objetos em seu campo de visão. Ele é projetado para detectar o movimento de corpos que emitem calor, como seres humanos e animais, sendo amplamente utilizado em sistemas de iluminação automática e alarmes.

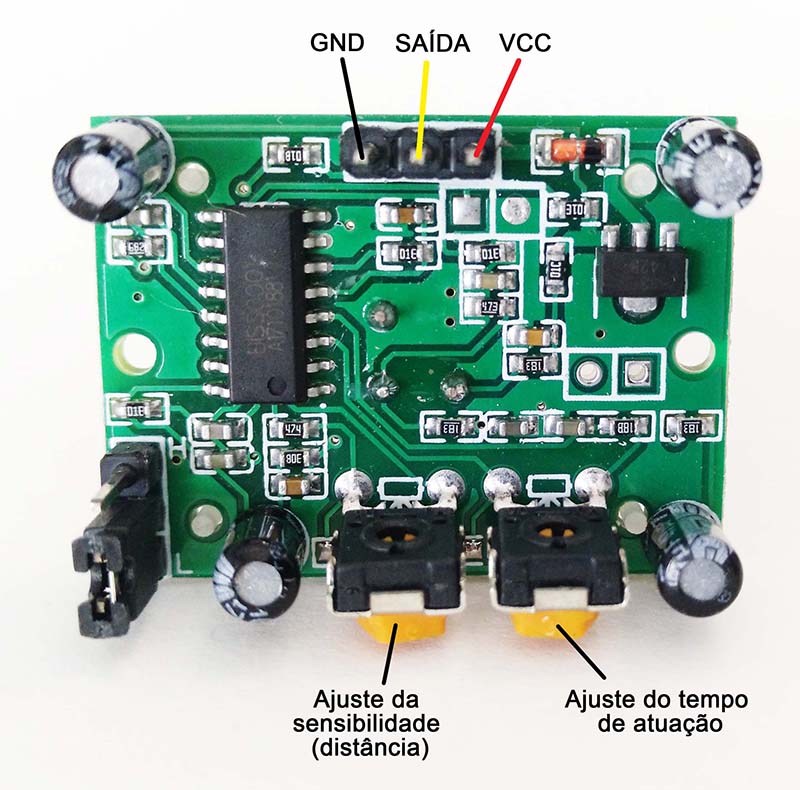
Controle e Calibração
O sensor possui dois potenciômetros na parte inferior para ajuste manual:
- Sensibilidade: Ajusta o alcance da detecção, variando entre 3 a 7 metros.
- Tempo de Delay (TIME): Define quanto tempo a saída permanecerá em nível alto após detectar movimento (5 a 200 segundos).
Lógica de Saída
Ao detectar movimento, o pino de dados assume nível ALTO (3.3V). Mesmo que o movimento pare, a saída permanece ativa pelo tempo configurado no potenciômetro antes de retornar ao nível BAIXO (0V).
Especificações Técnicas
Tensão de Operação:4.5V a 20V DCTensão de Saída (Dados):3.3V (Alto) / 0V (Baixo)Distância de Detecção:3 a 7 metros (Ajustável)Tempo de Bloqueio:2,5 segundos (Padrão)Ângulo de Detecção:< 100° (em formato de cone)
Conectividade (Pinagem)
Siga as orientações abaixo para realizar a conexão correta dos pinos de alimentação e sinal:
| Pino | Conexão |
|---|---|
| VCC | Alimentação Positiva (5V do Arduino) |
| GND | Terra (GND do Arduino) |
| OUT / DADOS | Sinal de saída conectado a um Pino Digital |
Sensor de Distância Ultrassônico (HC-SR04)
O HC-SR04 é um módulo projetado para medir distâncias com precisão entre 2cm e 4m. Ele utiliza ondas sonoras de alta frequência (inaudíveis para humanos) para detectar objetos, funcionando de forma semelhante ao sonar de um morcego ou de um submarino.

Princípio de Funcionamento
O sensor funciona em quatro etapas rápidas:
- Emissão: O pino Trigger envia um sinal para disparar a onda sonora.
- Reflexão: A onda viaja pelo ar até atingir um obstáculo e retornar.
- Captura: O receptor do módulo detecta o eco que retorna.
- Cálculo: O pino ECHO indica o tempo de viagem, que é usado para calcular a distância.
Especificações Técnicas
Alimentação:5V DC (via pino VCC)Alcance:2cm até 400cmPrecisão:Aproximadamente 3mmÂngulo de Medição:< 15 grausCorrente de Operação:< 2mA
Identificação da Pinagem
Siga o esquema abaixo para realizar a conexão correta do sensor ultrassônico no seu projeto:
| Pino | Função | Conexão Arduino |
|---|---|---|
| VCC | Alimentação Positiva | Pino 5V |
| Trig (Trigger) | Gatilho de entrada (envio) | Pino Digital (ex: 12) |
| Echo | Sinal de saída (recepção) | Pino Digital (ex: 11) |
| GND | Terra | Pino GND |
Desvio de Obstáculos
Essencial para robôs autônomos que precisam navegar sem colisões.
Monitoramento
Utilizado em alarmes e controle de nível de reservatórios.
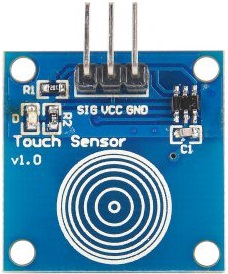
Sensor de Touch Capacitivo (TTP223B)
O Sensor de Touch Capacitivo é um dispositivo eletrônico capaz de detectar o toque humano através da variação da capacitância elétrica. Diferente de um botão mecânico, ele não possui partes móveis, o que elimina o desgaste físico e permite a criação de interfaces modernas, higiênicas e sensíveis.
Como funciona?
O sensor monitora a carga elétrica na superfície da placa. Quando um dedo se aproxima, o corpo humano atua como um capacitor natural, alterando a carga no sensor. Essa variação é processada pelo chip integrado (como o TTP223), que altera o estado da saída digital.
Vantagens
Por ser capacitivo, ele pode ser instalado atrás de superfícies finas de acrílico, plástico ou vidro, transformando o próprio painel do robô ou da caixa de automação em um botão invisível.
Especificações Técnicas
Tensão de Operação:2,5V a 5,5V DCSaída em Estado Alto (Ativado):~0,8V (VCC)Saída em Estado Baixo (Inativo):~0,3VTempo de Resposta:~60ms (Modo rápido)Consumo:Muito baixo (ideal para dispositivos a bateria)
Conexão e Pinagem
Certifique-se de realizar as conexões seguindo a pinagem correta para garantir o funcionamento do componente e evitar curto-circuitos:
| Pino | Função | Conexão Arduino |
|---|---|---|
| VCC / + | Alimentação Positiva | Pino 5V ou 3.3V |
| GND / - | Terra | Pino GND |
| SIG / OUT | Sinal de Saída Digital | Pino Digital (ex: 7) |
Interatividade
Perfeito para painéis de controle sem botões salientes.
Higiene
Fácil de limpar, pois não acumula sujeira em frestas mecânicas.